Active Semantic Mapping with Mobile Manipulator in Horticultural Environments
International Conference on Robotics and Automation (ICRA 2025)
Conference paper
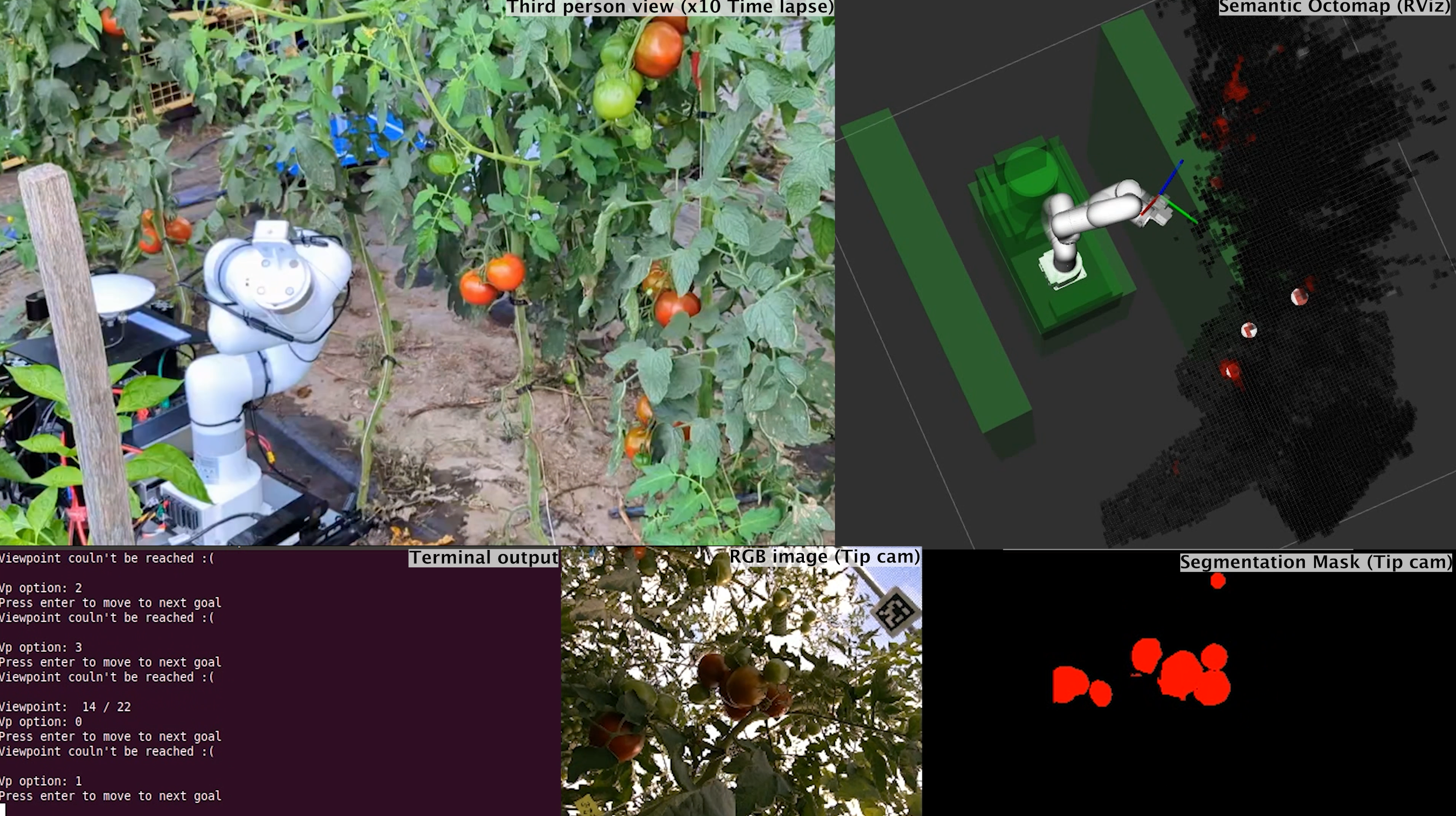
We introduce an efficient active semantic mapping approach for horticultural robotics, using a mobile manipulator with an RGB-D camera. Probabilistic semantic octomaps are used to detect target regions of interest such as fruits, generate candidate viewpoints, and compute information gain for next-best-view planning. An efficient ray-casting strategy and a novel information gain function accounting for semantics and occlusions is introduced for efficient target-focused map exploration.